Исторический обзор решений для динамической компенсации реактивной мощности с начала применения переменного тока для передачи электроэнергии до наших дней
Передача электрической энергии с использованием переменного тока началась еще в конце 19 века, заменяя существовавшие небольшие локальные системы постоянного тока. При расширении локальных систем энергоснабжения и обеспечении передачи на дальние расстояния возникали различные проблемы с управлением напряжением и стабильностью, связанные в первую очередь с небалансом реактивной мощности в системах. Для управления напряжениями стационарной системы в основном использовалась коммутируемая компенсация реактивной мощности (шунтирующие конденсаторы и шунтирующие реакторы). Динамическая компенсация реактивной мощности основывалась на вращающихся машинах, например синхронных компенсаторах.
В середине 60-х годов 20 века появились первые статические компенсирующие устройства реактивной мощности, то есть реакторы, управляемые постоянным током (ртутные вентили) и устройства, управляемые тиристорами (конденсаторы с тиристорным управлением, реакторы с тиристорным управлением).Малое время отклика, низкие потери и меньшие требования к техническому обслуживанию сняли многие ограничения, присущие вращающимся машинам и устройствам, управляемым постоянным током. Оценка рабочих потерь имеет своим результатом всё большее увеличение использования статических конденсаторных установок реактивной мощности, состоящих из комбинаций ветвей конденсаторов и реакторов с тиристорным управлением. Эти шунтирующие устройства совместно с последовательными конденсаторами с тиристорным управлением составили основу гибких систем передачи переменного тока (FACTS). FACTS позволяет более эффективно использовать системы передачи благодаря улучшенному динамическому управлению напряжением системы с одной стороны и более высокой пропускной способностью с другой стороны. В системах передачи переменного тока в настоящее время установлены статические конденсаторные установки реактивной мощности общей мощностью более 100 000 МВА.
В устройствах FACTS стали использоваться новые силовые электронные приборы (GTO, IGCT, IGBT), которые позволяют использовать преобразователи тока и напряжения для обеспечения быстродействующей компенсации реактивной мощности. На основе дальнейшего развития систем управления, совершенствования полупроводниковых приборов и новых технологий преобразователей напряжения в настоящее время компенсация реактивной мощности является ключевым фактором для надёжной передачи энергии переменного тока. В данной статье вашему вниманию предлагается обзор положений в области систем передачи от начала применения компенсации реактивной мощности до существующего в настоящее время положения. Также сравниваются ранние решения и современные устройства, приводятся основные факторы и этапы совершенствования установок и обсуждаются преимущества современных устройств.
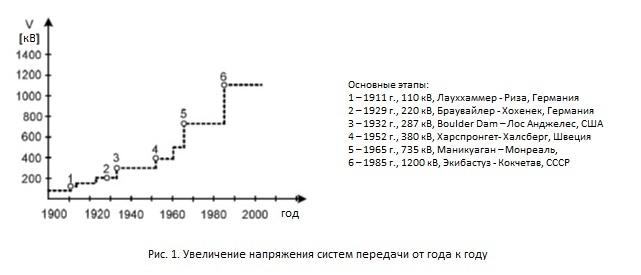
Передача энергии переменного тока началась в конце 19 века. Развитие шло от низких уровней напряжения и ограниченных районов до больших расстояний, высоких мощностей и всё более возрастающего напряжения передачи. На рис. 1 приводится примерная картина возрастания напряжения систем передачи от года к году.
Генерация электрической энергии и её потребители обычно не находятся близко друг от друга. Большие города и большие промышленные регионы часто получают электроэнергию от источников, находящихся на большом расстоянии. Составляющие системы и нагрузка включают в себя источники реактивной мощности (конденсаторы и катушки индуктивности), которые оказывают влияние на профиль напряжения сети и стабильность системы. Линии передачи высоковольтных систем (735 кВ) могут иметь до 200 Мвар емкостной мощности на длину 100 км. Кабельные соединения могут давать даже большую реактивную мощность. Большие нагрузки, содержащие электрические дуговые печи или мощные приводы, могут иметь до 100 Мвар индуктивной реактивной мощности. Без соответствующей компенсации реактивной мощности в длинных линиях передачи могут наступить критические условия работы системы из-за сильных колебаний напряжения и проблем со стабильностью. Эти проблемы могут быть решены с помощью схем параллельной и последовательной компенсации.
Поперечная компенсация реактивной мощности
В настоящее время используются коммутируемые конденсаторные установки для компенсации реактивной мощности и конденсаторные установки с непрерывным управлением. Емкостная мощность линий передачи или кабельной сети частично компенсируется параллельным шунтом из подключенных к линии реакторов, индуктивные нагрузки компенсируются шунтирующими конденсаторами. Линейные реакторы постоянно подключены к линиям передачи, чтобы обеспечить постоянную компенсацию в широком рабочем диапазоне. Шунтирующие конденсаторы обычно разделены на ступени для компенсации промежуточных нагрузок. Непрерывное управление реактивной мощностью ранее было возможно только с помощью регулирования возбуждения генераторов или специальных синхронных конденсаторных установок. Первые устройства статической компенсации строились на основе насыщенных реакторов, следующими были тиристорные установки. Основой последних устройств компенсации реактивной мощности стали преобразователи напряжения, использующие сначала запираемые тиристоры (GTO), а сейчас биполярные транзисторы с изолированным затвором (IGBT).
A. Синхронные компенсаторы
Поведение синхронного компенсатора определяется влиянием МДС возбуждения на реактивную мощность. В некоторых случаях с целью экономии средств для управления реактивной мощностью используются старые генераторы, демонтированные с турбин. Вновь изготовленные синхронные компенсаторы использовались в конкретных местах системы для улучшения профиля напряжения и увеличения мощности короткого замыкания особенно в точке подключения высоковольтных вставок постоянного тока. Время отклика машин было улучшено с внедрением систем возбуждения с управлением с помощью тиристоров. На рис. 2 показана схема подключения синхронного компенсатора к системе высокого напряжения.
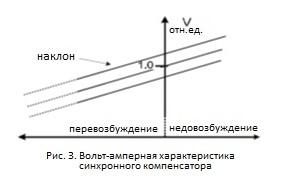
На рис. 3 показана вольт-амперная рабочая характеристика. Наклон характеристики зависит от реактивного сопротивления двигателя и его сетевого трансформатора. Изменение опорного напряжения приводит к работе синхронного компенсатора в перевозбуждённом или недовозбуждённом режиме, то есть он отдаёт (как ёмкость) или поглощает (как индуктивность) реактивную мощность. Он реагирует сам, то есть без управляющего воздействия, и обеспечивает поддержание напряжения вне рабочей характеристики в установившемся режиме в условиях переходного процесса.
B. Статические компенсаторы на основе насыщающихся реакторов
Эти первые статические компенсаторы строились из статических (неподвижных) компонентов, то есть конденсаторов и реакторов. Реакторы работали в области насыщения, ограничивая при этом изменения напряжения. На рис. 4 показано устройство такого компенсатора и его рабочие характеристики.
Насыщающийся реактор (SR) обычно выполняется на 9-стержневом стальном магнитопроводе для нейтрализации гармоники третьего порядка. Наклон характеристики SR уменьшается благодаря конденсатору Cs, подключенному последовательно. Параллельно им подключен шунтирующий конденсатор Cp, который обеспечивает емкостной характер устройства. В правой части рис. 4 показана характеристика каждого компонента (SR, Cs и Cp), суммарная характеристика SR и Cs (SR+Cs) и окончательная характеристика SR+Cs+Cp после параллельного подключения Cp. Насыщающиеся статические компенсаторы по существу реагируют на изменения напряжения системы. Регулировка опорного напряжения производится при помощи переключателя ответвлений сетевого трансформатора. Демпфирующие фильтры подключаются параллельно конденсатору Cs для устранения возможности феррорезонанса совместно с защитой от перенапряжения конденсатора. Общий рабочий диапазон может быть установлен ступенчатым переключением шунтирующих конденсаторов. Статический компенсатор нормально работает в условиях симметричного напряжения системы.
C. Статические компенсаторы реактивной мощности
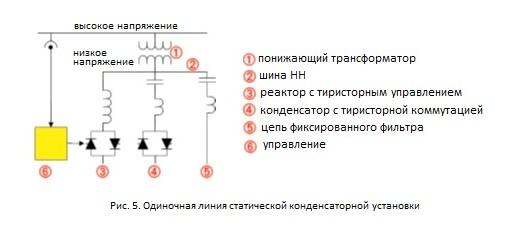
Статические конденсаторные установки реактивной мощности составлены из статических компонентов (индуктивностей и емкостей), с быстродействующим управлением с помощью полупроводниковых устройств (тиристоров). Преимуществами статических компенсаторов по сравнению с синхронными компенсаторами являются более низкие требования к техническому обслуживанию (нет движущихся частей),простое трёхфазное или однофазное управление, другие опциональные возможности управления, а также меньшая стоимость при тех же номинальных параметрах. На рис. 5 показано типовое устройство статического компенсатора.
Необходимая емкостная мощность для системы может быть установлена в емкостных ветвях, которые могут быть фиксировано подключенными к шине низкого напряжения или коммутируемыми с помощью тиристорных вентилей (конденсаторы с тиристорной коммутацией). Фиксированные ветви обычно настраиваются с помощью последовательных реакторов для фильтрации гармоник. Индуктивная мощность устанавливается в одной фазе или комбинациях трёхфазных реакторов, которые плавно регулируются с помощью тиристорных вентилей. Ветви подключены к высоковольтной системе через специальный трансформатор. Трансформатор изменяет напряжение системы до уровня, оптимального для работы тиристора.
Ветви реакторов с тиристорным управлением (TCR)
Ветви реакторов с тиристорным управлением содержат реакторы, которые управляются по углу с помощью тиристорных ключей. Три однофазные ветви соединяются в треугольник для уменьшения генерации гармоник, кратных трём, при симметричной работе.
Ветви конденсаторов с тиристорной коммутацией (TSC)
Ветви конденсаторов с тиристорной коммутацией содержат конденсаторы и токоограничивающие реакторы и коммутируются с помощью тиристорных ключей. Ветви могут соединяться треугольником или звездой. При соединении звездой один ключ становится лишним и может не приниматься во внимание в одной из трёх фаз. При использовании тиристоров с таким же номинальным током, как для TCR, номинал ветви будет соответственно ниже.
Тиристоры
Развитие технологий тиристоров большой мощности создало основу использования электронных устройств большой мощности в энергосистемах.
Процесс совершенствования тиристоров (см. рис. 6) начался в 70-х годах. Токопроводящая способность мощных тиристоров ступенчато возрастала от 800 А (эфф.) до 4000 А (эфф.) при использовании кремниевых подложек с диаметром от 40 до 125 мм. При этом величина максимально допустимого обратного напряжения увеличилась с 1,6 до 8 (10) кВ. Следующий этап дальнейшего увеличения номинальных токов тиристоров ожидается с 2009 г.
Конфигурации статической конденсаторной установки
Вначале в статических конденсаторных установках для соответствия условиям работы различных цепей, управляемых тиристорами, они устанавливались параллельно. Последовательное подключение тиристоров обуславливалось напряжением шины низкого напряжения (обычно до 36 кВ). 12-пульсное подключение использовалось для разделения ветвей, управляемых тиристорами, и уменьшения тока короткого замыкания цепи каждого вентиля, а также чтобы избежать 6-пульсных гармонических искажений в системе. На рис. 7 показан типовой статический компенсатор реактивной мощности в 12-пульсном соединении, использующий только одну ветвь TCR и фиксированную емкостную ветвь (FC).
Конфигурации TCR/TSC
Конфигурации статических компенсаторов изменялись со временем по мере повышения номинальных токов и в связи с обсуждающимися далее факторами, связанными с потерями, занимаемой площадью и мобильностью.
Потери
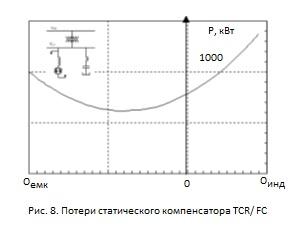
Величины потерь в статических компенсаторах с конфигурацией TCR/FC показаны на рис.8. Значение потерь не включает в себя нагрузку, потери трансформатора, потери реактора с тиристорным управлением и реактора фильтра, диэлектрические потери конденсаторов, потери в ключах, как в стационарном режиме, так и при переключении, потери в оборудовании охлаждения (трансформатор и вентили) и во вспомогательном оборудовании.
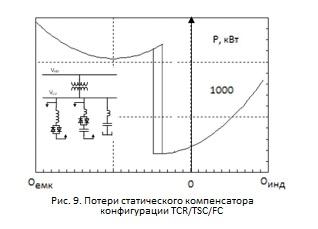
Средняя величина рабочих потерь в статических компенсаторах с конфигурацией TCR/FC составляет около 0,5 – 0,7% номинальной емкостной мощности. На рис. 9 показан график рабочих потерь установки с конфигурацией TCR/TSC/FC.
Средняя величина рабочих потерь в статических компенсаторах конфигурации TCR/TSC/FC составляет около 0,5 – 0,7% номинальной емкостной мощности компенсатора. Стоимость конфигурации компенсатора TCR/TSC/FC выше, чем конфигурации TCR/FC за счёт дополнительной стоимости конденсаторов с тиристорной коммутацией. Из-за того, что статический компенсатор должен работать основную часть времени при нуле на выходе, чтобы быть готовым к быстрому поддержанию напряжения при нештатных ситуациях в системе, стоимость потерь должна определяться в рабочей области.
Возможна следующая методика оценки:
Pveval = Pv1 x t1 + Pv2 x t2 + … + Pvn x tn, где
Pveval – значение общих рабочих потерь,
Pv1, 2, n – средние потери в рабочем диапазоне 1, 2, n для периодов работы t1, t2, tn.
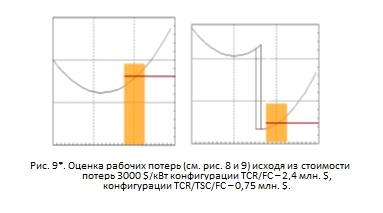
Суммарное время работы – до 8760 часов за год. Стоимость потерь определяется умножением Pveval на конкретную стоимость потерь ($/кВт) у потребителя, величина которой зависит от поставщика электроэнергии от 1500 до 8000 $/кВт.
Общая стоимость компенсации реактивной мощности состоит из стоимости инвестиций (составные части, установка) и стоимости потерь. Решение статического компенсатора конфигурации TCR/TSC/FC может оказаться более экономичным, чем более простое – TCR/FC. Последние установки статических компенсаторов реактивной мощности в основном имели конфигурации TCR/TSC/FC.
Занимаемая площадь
Несмотря на то, что конфигурации TCR/TSC/FC требуют больше места, так как имеют больше ветвей, требования по площади размещения могут быть уменьшены более чем на 50% (в настоящее время – до 8 м2/Мвар) по сравнению с ранними конструкциями. Требования по занимаемой площади также могут использоваться в качестве критерия оценки.
Мобильность
Процессы либерализации и приватизации могут приводить к изменениям потоков в некоторых высоковольтных системах в течение короткого времени. Некоторые ранее установленные конденсаторные установки реактивной мощности могут оказаться больше не эффективными в данном месте, и может потребоваться их установка в другой точке системы. Возможность перемещения установки также может быть использована в качестве критерия при оценке общей стоимости.
Переход от аналогового управления к цифровому
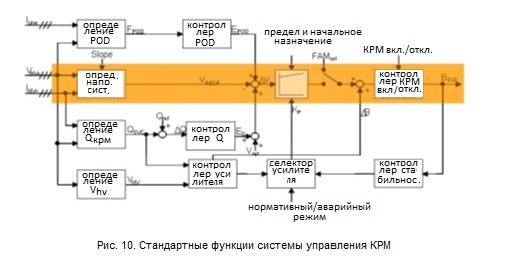
Со временем происходил переход от чисто аналоговых систем управления и защиты к цифровым системам. Преимуществами цифровых систем являются отсутствие дрейфа параметризации и сигнализации, программное управление функциональностью, графическое конфигурирование, самодиагностика и модульное построение. Современные системы управления конденсаторных установок имеют многообразные функции и позволяют полностью интегрироваться в систему. На рис. 10 показана схема блока управления, включающего в себя различные функции управления и замкнутую петлю обратной связи.
Выделенная на рисунке часть схемы показывает прохождение сигнала управления напряжением. Сигнал управления напряжением может быть модулирован быстродействующим сигналом управления для подавления качаний мощности (POD) в случае серьёзных проблем со стабильностью после аварии системы. Замедленное действие тракта управления реактивной мощностью помогает статической конденсаторной установке оперировать из заданной оптимальной рабочей точки, например 0 Мвар. Из этой оптимальной рабочей точки конденсаторная установка сможет быстро отдавать или поглощать реактивную мощность в критических условиях работы системы.
D. Преобразователи напряжения
Идея применить самокоммутирующиеся преобразователи для статической компенсации реактивной мощности долго обсуждалась перед созданием в 70-е годы 20 века первой конструкции на тиристорах со специальной схемой для ускорения коммутации. В принципе, могут быть использованы преобразователи с фиксированным постоянным напряжением или током. Тем не менее, при поддержке других отраслей, например, систем электроприводов, стал доступен широкий ряд полупроводниковых приборов с управляемым запиранием и полным максимальным обратным напряжением. В первых экспериментальных образцах статических компенсаторов STATCOM на базе преобразователей напряжения были использованы запираемые тиристоры (GTO).
На векторной диаграмме, на рис. 11, показан емкостной характер работы. Фаза и амплитуда тока могут регулироваться изменением VVSC. Для данного напряжения системы VN регулируется напряжение преобразователя VVSC, чтобы получить ток IN, который может находиться внутри зоны, обозначенной «максимальный ток преобразователя». Если пренебречь потерями, можно считать, что ток опережает напряжение или отстаёт от напряжения на 90°. Значение максимального тока симметрично при опережении или отставании по фазе. В широком диапазоне изменения напряжения системы ток может оставаться неизменным. Эта функция графически представлена на рис. 12, где сравниваются вольт-амперные характеристики STATCOM и статические конденсаторные установки. В условиях низкого напряжения STATCOM может обеспечить большую мощность, чем СКРМ, а при перенапряжении максимальная выходная мощность STATCOM меньше.
Развитие технологий преобразователей напряжения для компенсации реактивной мощности было нацелено на следующие задачи: улучшение поддержания работы системы в случае понижения напряжения, повышение скорости отклика при компенсации фликеров, создание более компактных и мобильных конструкций, уменьшение взаимного влияния гармоник с системой энергоснабжения. В настоящее время предлагается много технических решений, которые сводятся к концепции мультипреобразования, высоковольтным ШИМ-преобразователям или многоуровневым преобразователям. Причины сложившейся ситуации и перспективы можно увидеть из истории развития. В первых преобразователях напряжения количество последовательно соединённых запираемых тиристоров было ограничено в основном тем, что нельзя было обеспечить равномерное распределение напряжений между отдельными тиристорами. Это приводило к тому, что выходная мощность одиночного преобразователя была мала. Также высокие потери при коммутации препятствовали эффективному использованию широтно-импульсной модуляции (ШИМ) для получения синусоидальной формы тока. Эти ограничения были впервые преодолены сочетанием нескольких преобразователей при использовании подавления гармоник с помощью магнитных цепей.
Позднее появились полупроводниковые приборы с улучшенной коммутационной способностью. С внедрением коммутируемых по затвору запираемых тиристоров (IGCT) были созданы мощные преобразователи с номинальными мощностями до 10 МВА. С использованием высоковольтных биполярных транзисторов постоянного тока с изолированным затвором (IGBT) были созданы вентили на 300 кВ, что дало возможность реализации одиночных преобразователей диапазона 100 МВА.
В преобразователях на IGBT выходной синусоидальный ток формируется с помощью ШИМ с высокой частотой коммутации (в килогерцовом диапазоне). Кроме того факта, что высокая частота коммутации ведёт к значительным потерям преобразователя, наличие крутых фронтов высокого напряжения dv/dt требует применения специального оборудования для предотвращения воздействия высокой частоты и принятия мер по ограничению электромагнитных помех.
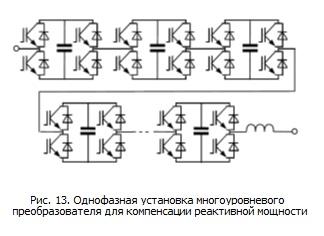
Дальнейшее увеличение предложения полупроводников высокой мощности и эффективных систем управления позволяют сегодня преодолевать проблемы, связанные с высокой частотой коммутации высоковольтных вентилей. Системы преобразования, появившиеся в последнее время, имеют модульное построение и генерируют выходное напряжение переменного тока, близкое к синусоидальному с большим количество уровней напряжения (многоуровневые преобразователи).
На рис. 13 показана конфигурация однофазного преобразователя, используемого для компенсации реактивной мощности. Три таких устройства могут быть соединены в треугольник. Напряжения и токи многоуровневых преобразователей аналогичны напряжениям и токам синхронных компенсаторов, но многоуровневые преобразователи имеют намного меньшие времена отклика. Благодаря сниженному взаимному влиянию гармоник с подключенной системой многоуровневые преобразователи на преобразователях напряжения по сравнению с другими типами статических компенсаторов имеют меньше компонентов и проще встраиваются в системы энергоснабжения. Потери энергии многоуровневого преобразователя значительно меньше по сравнению с преобразователями других типов, но всё-таки несколько больше, чем у компенсаторов на тиристорах.
На сегодняшний день общая мощность установленных статических компенсаторов составляет около 110 000 Мвар, из них мощность преобразователей напряжения, применяемых для систем передачи, достигает около 4000 Мвар.
Продольная компенсация реактивной мощности
Электростанции по экономическим причинам не строятся близко к нагрузкам, то есть выработанная энергия должна транспортироваться на большие расстояния. На рис. 14 показана зависимость напряжения на конце линии 345 кВ от передаваемой активной мощности для трёх величин длины линии (100, 200 и 300 км). Натуральная мощность этой линии – 410 МВт.
Чем длиннее линия, тем меньше максимальная передаваемая мощность. Электрическая длина линии может быть увеличена при установке последовательных конденсаторов. Этот принцип раньше использовался для компенсации импеданса трансформаторов, чтобы улучшить параметры напряжения при больших изменениях нагрузки, подключенной на стороне низкого напряжения.
A. Фиксированные последовательные конденсаторы
Последовательные конденсаторы могут быть установлены на обоих концах линии или в средней точке. Основное внимание уделяется профилю напряжения вдоль линии при передаче электроэнергии. Степень компенсации обычно не превышает 70% импеданса линии. Фиксированные последовательные конденсаторы могут быть установлены как один основной блок или в субблоках, чтобы обеспечить возможность ступенчатой адаптации степени компенсации для различных условий работы системы.
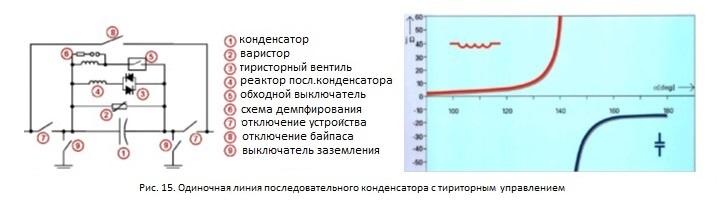
B. Последовательные конденсаторы с тиристорным управлением
В некоторых приложениях часть фиксированных последовательных конденсаторов может быть дополнена параллельными реакторами с тиристорным управлением, которые допускают плавное регулирование в пределах определённого диапазона угла управления. На рис. 15 показана установка с такими последовательными конденсаторами с тиристорным управлением и её возможная характеристика управления импедансом.
Последовательные конденсаторы с тиристорным управлением имеют ограниченный рабочий диапазон угла управления от около 150° до 180°. Продолжительность работы в индуктивном диапазоне невозможна из-за слишком больших токов тиристоров. Допустима только работа в режиме полной проводимости реактора, управляемого тиристором.
C. Преобразователи напряжения
Установки STATCOM с преобразователями напряжения, установленные последовательно в линию, формируют унифицированный контроллер потока мощности. В других станциях такие последовательно подключенные конфигурации преобразователей напряжения устанавливаются для целей распределения потоков мощности или нагрузки между параллельными линиями (трансформируемый статический компенсатор). Преимуществом последовательной установки с преобразователем напряжения является возможность управления в индуктивной области.
Подведем итоги
Динамическая компенсация реактивной мощности с управлением при помощи силовой электроники обеспечивает улучшение работы систем передачи и теперь является признанным средством компенсации реактивной мощности среди других устройств.
Большое разнообразие технологий FACTS обеспечивает надёжные решения для большинства имеющихся и возникающих вновь требований при передаче электроэнергии.
Комбинация динамичной и обычной коммутируемой компенсации реактивной мощности часто приводит к экономичным решениям для работы в установившемся режиме и при переходных процессах в электрической системе. FACTS на основе преобразователей напряжения будут использоваться более широко, особенно в диапазоне малых и средних мощностей.
В ближайшем будущем, вероятно, для преодоления имеющихся ограничений при работе систем передачи потребуется большее количество конденсаторных установок компенсации реактивной мощности, которые рассматриваются как важное средство для повышения стабильности системы и защиты от перебоев энергоснабжения.


 Он реагирует сам, то есть без управляющего воздействия, и обеспечивает поддержание напряжения вне рабочей характеристики в установившемся режиме в условиях переходного процесса.
Он реагирует сам, то есть без управляющего воздействия, и обеспечивает поддержание напряжения вне рабочей характеристики в установившемся режиме в условиях переходного процесса.

 Развитие технологий тиристоров большой мощности создало основу использования электронных устройств большой мощности в энергосистемах.
Развитие технологий тиристоров большой мощности создало основу использования электронных устройств большой мощности в энергосистемах.
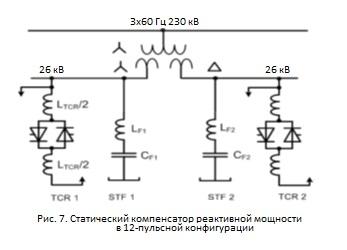 шины низкого напряжения (обычно до 36 кВ). 12-пульсное подключение использовалось для разделения ветвей, управляемых тиристорами, и уменьшения тока короткого замыкания цепи каждого вентиля, а также чтобы избежать 6-пульсных гармонических искажений в системе. На рис. 7 показан типовой статический компенсатор реактивной мощности в 12-пульсном соединении, использующий только одну ветвь TCR и фиксированную емкостную ветвь (FC).
шины низкого напряжения (обычно до 36 кВ). 12-пульсное подключение использовалось для разделения ветвей, управляемых тиристорами, и уменьшения тока короткого замыкания цепи каждого вентиля, а также чтобы избежать 6-пульсных гармонических искажений в системе. На рис. 7 показан типовой статический компенсатор реактивной мощности в 12-пульсном соединении, использующий только одну ветвь TCR и фиксированную емкостную ветвь (FC).
 так и при переключении, потери в оборудовании охлаждения (трансформатор и вентили) и во вспомогательном оборудовании.
так и при переключении, потери в оборудовании охлаждения (трансформатор и вентили) и во вспомогательном оборудовании.
 Идея применить самокоммутирующиеся преобразователи для статической компенсации реактивной мощности долго обсуждалась перед созданием в 70-е годы 20 века первой конструкции на тиристорах со специальной схемой для ускорения коммутации. В принципе, могут быть использованы преобразователи с фиксированным постоянным напряжением или током. Тем не менее, при поддержке других отраслей, например, систем электроприводов, стал доступен широкий ряд полупроводниковых приборов с управляемым запиранием и полным максимальным обратным напряжением. В первых экспериментальных образцах статических компенсаторов STATCOM на базе преобразователей напряжения были использованы запираемые тиристоры (GTO).
Идея применить самокоммутирующиеся преобразователи для статической компенсации реактивной мощности долго обсуждалась перед созданием в 70-е годы 20 века первой конструкции на тиристорах со специальной схемой для ускорения коммутации. В принципе, могут быть использованы преобразователи с фиксированным постоянным напряжением или током. Тем не менее, при поддержке других отраслей, например, систем электроприводов, стал доступен широкий ряд полупроводниковых приборов с управляемым запиранием и полным максимальным обратным напряжением. В первых экспериментальных образцах статических компенсаторов STATCOM на базе преобразователей напряжения были использованы запираемые тиристоры (GTO).
 345 кВ от передаваемой активной мощности для трёх величин длины линии (100, 200 и 300 км). Натуральная мощность этой линии – 410 МВт.
345 кВ от передаваемой активной мощности для трёх величин длины линии (100, 200 и 300 км). Натуральная мощность этой линии – 410 МВт.